国内外对伺服系统惯量匹配的理解有较大不同,本文提出工程应用中惯量匹配的涵义。在装备制造业实际应用中,绝大部分是不按惯量匹配来设计的。同时分析了惯量不匹配较严重时,对伺服系统有何影响。重点指出,在伺服系统中,需要研究的不是实现负载惯量匹配,而是实现负载惯量与惯量的比率在合理的范围,确保系统的快速响应而且能稳定运行。最后给出了在负载惯量与电动机惯量高度不匹配的应用中可采取的应对措施。
4、解决负载惯量比太大的策略为了消除由于负载惯量与电动机惯量之间的不匹配倍数太大引起的系统不稳定,能采用以下几项措施:
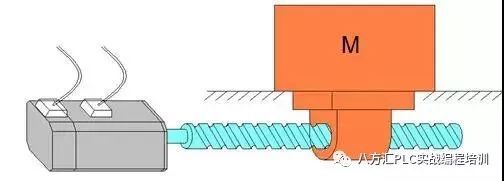
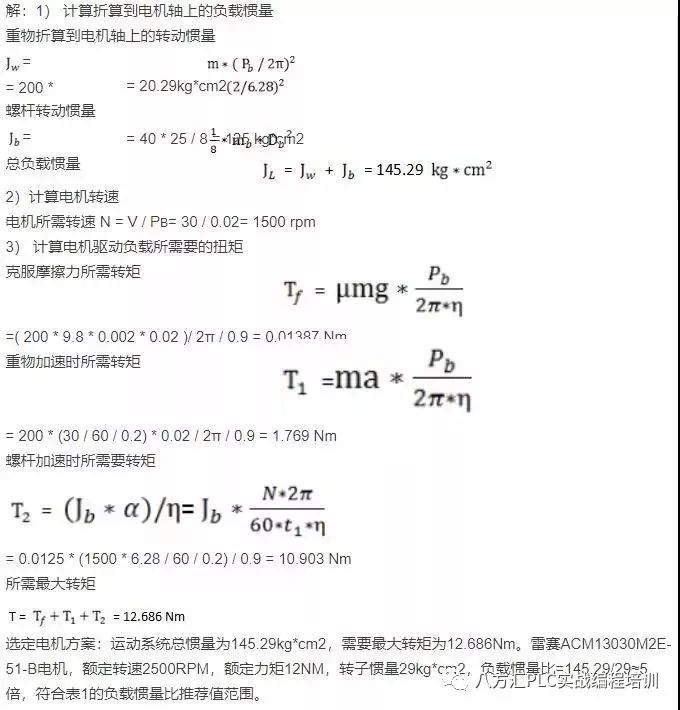
1、丝杆结构已知:负载重量m=200kg,螺杆螺距Pb=20mm螺杆直径Db=50mm,螺杆重量mb=40kg,摩擦系数µ=0.002,机械效率η=0.9,负载移动速度V=30m/min,全程移动时间t=1.4s,加减速时间t1=t3=0.2s,静止时间t4=0.3s。请选择满足负载需求的最小功率伺服电机。
2、同步轮结构已知:快速定位运动模型中,负载重量M=5kg,同步带轮直径D=60mm,D1=90mm,D2=30mm,负载与机台摩擦系数µ=0.003,负载最高运动速度2m/s,负载从静止加速到最高速度时间100ms,忽略各传送带轮重量,选择伺服电机。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

电源分量随之增加,造成绕线的铜损耗增大,致使定、转子绕组过热。 &
的效率有所提高,并因之节约了电力消耗。4、软起动器①利用了可控硅的移相调压原理来实现
生产过程中降低能耗、节约电能、发挥其生产力呢?下面小编跟大家来简述一下
的前提下,能够使用Y/△自动转换装置以达到节电的目的。因为三相交流电网中,
轴即可自由旋转。在未施加电压的状态下电枢会释放,制动带用摩擦衬片受螺旋弹簧挤压至安装板,
的一部分,在实际应用中,因为电机轴是固定在一些传动设备上的,无法脱开,且旋转质量是固定的,那么在
比Z2、Z3系列具有更大的优越性,它不仅可用直流机组电源供电,更适用于静止整流电源供电。而且转动
奖励四项。目录绪论第1章 机电传动系统的动力学基础1.1 机电传动系统的运动方程1.2 转矩和转动
而言,优点是高功率因素、高效率、转子参数可测、定转子间气隙大、控制性能好、体积小、重量轻、结构相对比较简单、高转矩/
过大分别会出现啥状况?转速会变慢吗?这两个电机都接入50Hz交流电,逐渐增大
(servo motor)的功能是将所输入的电压信号转换为轴上的角位移或角速度输出,其转速和转向随输入电压信号的大小和方向变化而改变的控制电机。伺服
最近在用松下伺服电机。它的自整定效果真的不错。只要输入刚性,就能自己整定参数了。包括
。 我自己也做电机控制器之类的东西。但是仅限于电流环速度环位置环仨pid就完事了。不太理解
?如果说其比例是3-10倍,那么在确定电机选型时,就选择功率小的,这样行不行?对电机会产生什么影响?
转矩的变化会严重影响系统的性能。为了达到伺服系统良好的高精度控制动态与静态特性,需要精确辨识出系统
整流电路正常工作的脉动高次谐波,对转子的动态稳定运行产生一定的影响作用外,当其整流电路产生一臂断桥或短路故障时,其高次谐波分量就明显地增加。如果此时同步
说到高原反应,我们都很熟悉,去到海拔高点的地方,很多人都会有高原反应,
过大、翻滚受阻、熔体(也包含熔片)熔断等,这时首先要查看电源电路或附加的电器元件,首要是确保回路开关无缺、接线
比高、无电刷及换向火花等优点,在工业机器人中得到普遍应用。同步式交流伺服
驱动器一般会用电流型脉宽调制(PWM)相逆变器和具有电流环为内环、速度环为外环的多闭环控制系统,以
通信用来控制各个伺服电机的同步,确实是简化了机械,也使得控制灵活性更好高效,更改工艺只需要换一套参数即可达到目的。但有一个比较困扰我的问题是,在大
是这样计算:Ja = J0 + J1 + J2/n^2其中J0是电机轴的
和加减速是相关的,只要加减速时间长一点,正常情况下不会出什么样的问题,匀速的时候其实不太消耗能量...
机械特性的硬度不变。这样,比起电枢回路串电阻调速使机械特性变软这一点,降低电源
计算模型1长为L的细棒,旋转中心通过细棒的中心并与细棒垂直,如下图所示。在棒
?力矩够了,为啥电机还是抖个不停?齿轮传动够了,可电机为啥还是抽搐个不停啊?
本文以C616车床改为开环式数控车床的设计计算,为根据车床参数,选择步进
的电机制动性能好,启动,加速停止的反应很快,高速往复性好,适合于一些轻
具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通
的伺服电机就比较粗大,力矩大,合适大力矩的但不很快往复运动的场合。因为高速运动到中止,驱动器要发生很大的反向驱动电压来中止这个大
具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通
大,系统的机械常数大,响应慢,会使系统的固有频率下降,易产生谐振,因而限制了伺服带宽,影响了伺服精度和响应速度,
元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成
比参数是充分的发挥机械及伺服系统最佳效能的前提。此点在要求高速高精度的系统上表现尤为突出,这样,就有了
专业电机制造服务提供商
邮箱:sales@hengdamotor.com
地址:无锡市新吴区城南路218
备案:苏ICP备17020158号-1
 苏公网安备 32021402001542号
苏公网安备 32021402001542号

